|
I am a senior research scientist at Huawei Technologies Research & Development working at the intersection of robotics and machine learning. Previously, I was a post-doc in surgical robotics at King's College London, and I hold a PhD in Informatics from the University of Edinburgh. Alongside my research in robotics, I am an advocate for open source projects and strive for the development of high-quality code. |

|
|
|
|
|
Amirhosein Alian, Yongqiang Zhao, Shiyi Gu, Xuyang Zhang, Zhuo Chen, Christopher E. Mower, Haitham Bou-Ammar, Shan Luo |
|
Anish Diwan, Davide Tateo, Christopher E. Mower, Haitham Bou-Ammar, Jan Peters, Oleg Arenz International Conference on Machine Learning (ICML), 2026. |
|
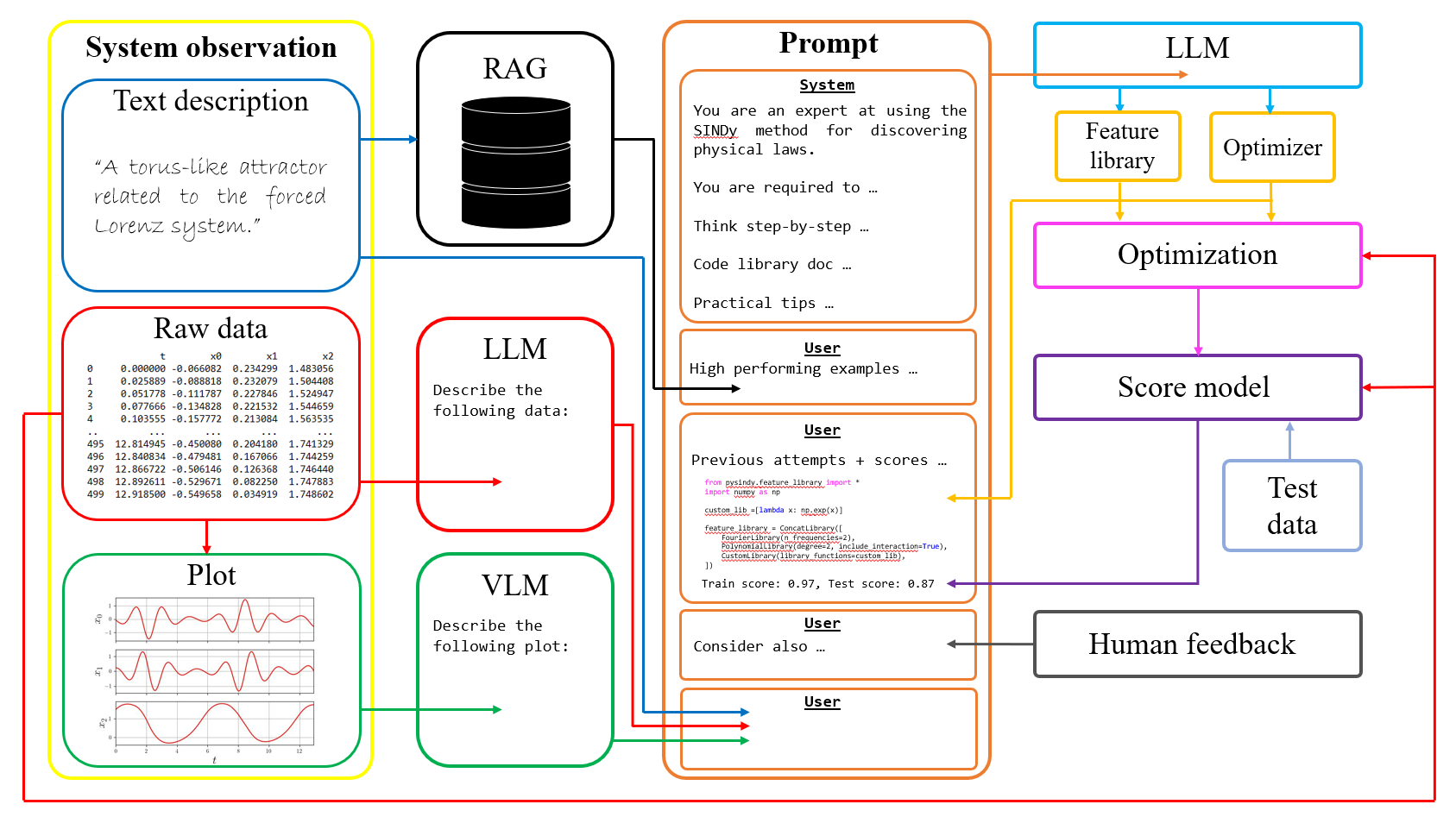
Christopher E. Mower, Yuhui Wan, Hongzhan Yu, Antoine Grosnit, Jonas Gonzalez-Billandon, Matthieu Zimmer, Puze Liu, Daniel Palenicek, Davide Tateo, Jan Peters, Kaixian Qu, Mike Zhang, Guowei Lan, Andrei Cramariuc, Cesar Cadena, Marco Hutter, Guangjian Tian, Yuzheng Zhuang, Kun Shao, Xingyue Quan, Jianye Hao, Jun Wang, Haitham Bou-Ammar Nature Machine Intelligence, 2026. paper website code Press: TechXplore Press: Computerworld Press: Bioengineer Press: Scienmag Press: AZoRobotics Press: Interesting Engineering Press: Open Source For You Press: Foro3D Press: Robotics.ee Press: QQ News |

|
Kaixian Qu, Guowei Lan, René Zurbrügg, Changan Chen, Christopher E. Mower, Haitham Bou-Ammar, Marco Hutter IEEE Robotics and Automation Letters (RAL), 2026. |
|
Helong Huang*, Christopher E. Mower∗, Guowei Huang∗, Sarthak Das, Magnus Dierking, Guangyuan Luo, Kai Tan, Xi Chen, Yehai Yang, Yingbing Chen, Yiming Zeng, Yinchuan Li, Zhanpeng Zhang, Shuang Wu, Yingxue Zhang, Weichao Qiu, Tongtong Cao, Mian Qin, Sajjad Pakdamansavoji, Yuecheng Liu, Yuzheng Zhuang, Guangjian Tian, Jianye Hao, Jun Wang, Haitham Bou-Ammar†, Xingyue Quan† *,†Equal contribution. IEEE Robotics and Automation Letters (RAL), 2025. |
|
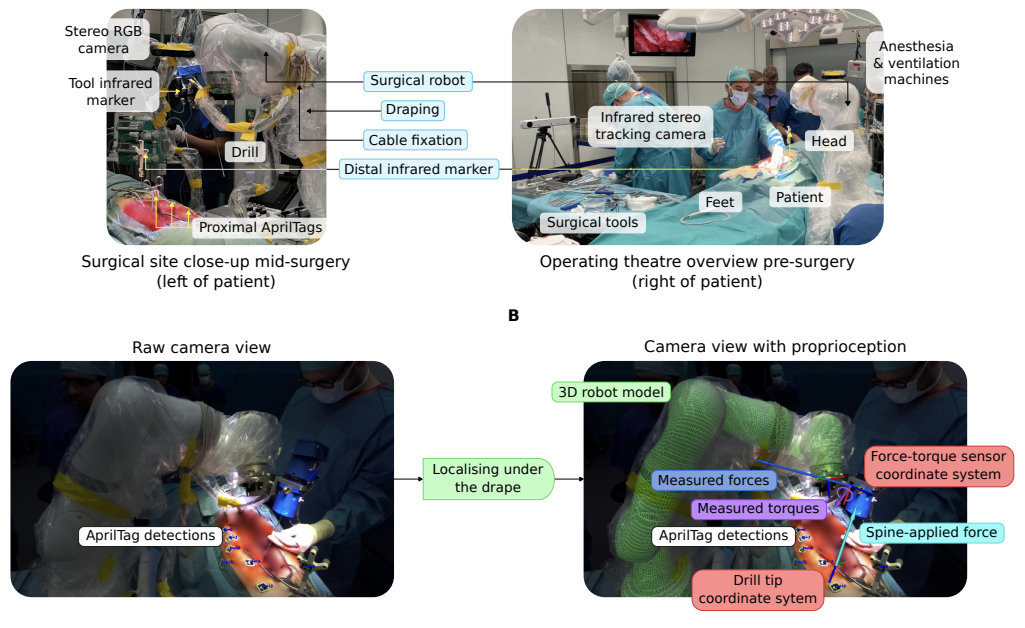
Martin Huber, Nicola A. Cavalcanti, Ayoob Davoodi, Ruixuan Li, Christopher E. Mower, Fabio Carrillo, Christoph J. Laux, Francois Teyssere, Thibault Chandanson, Antoine Harle, Elie Saghbiny, Mazda Farshad, Guillaume Morel, Emmanuel Vander Poorten, Philipp Furnstahl, Sebastien Ourselin, Tom Verauteren, Christos Bergeles. |
|
Magnus Dierking∗, Christopher E. Mower∗, Refinath S N, Abhineet Kumar, Helong Huang, Jiacheng Qiu, Wei Chen, Huidong Liang, Huang Guowei, Jan Peters, Quan Xingyue, Jun Wang, Haitham Bou-Ammar *Equal contribution. |
|
Martin Huber, Huanyu Tian, Christopher E. Mower, Lucas-Raphael Muller, Sebastien Ourselin, Christos Bergeles, Tom Verauteren. |
|
Christopher E. Mower, Haitham Bou-Ammar |
|
Aya Mutaz Zeidan, Zhouyang Xu, Christopher E. Mower, Weizhao Wang, Lisa Leung, Calum Byrne, Christopher Aldo Rinaldi, John Whitaker, Steven E Williams, Jonathan Behar, Lukas Lindenroth, Yohan Noh, Aruna Arujuna, R James Housden, Kawal Rhode. IEEE Transactions on Biomedical Engineering (TBME), 2025. |
|
Martin Huber, Christopher E. Mower, Sebastien Ourselin, Tom Verauteren, Christos Bergeles. Journal of Open Source Software (JOSS), 2024. [Award for the best open-source software @ Hamlyn Symposium 2024] |
|
Huanyu Tian, Martin Huber, Christopher E. Mower, Zhe Han, Changsheng Li, Xingguang Duan, Christos Bergeles. IEEE Transactions on Biomedical Engineering (TBME), 2025. |
|
Christopher E. Mower, Hongzhan Yu, Antoine Grosnit, Jan Peters, Jun Wang, Haitham Bou-Ammar |
|
Huanyu Tian, Martin Huber, Christopher E. Mower, Zhe Han, Changsheng Li, Xingguang Duan, Christos Bergeles. IEEE International Conference on Robotics and Automation (ICRA), 2024. |
|
Christopher E. Mower, Martin Huber, Huanyu Tian, Ayoob Davoodi, Emmanuel Vander Poorten, Tom Verauteren, Christos Bergeles. Conference on New Technologies for Computer and Robot Assisted Surgery (CRAS), 2023. [Podium Presentation] |
|
Charlie Budd, Jianrong Qiu, Oscar MacCormac, Martin Huber, Christopher E. Mower, Mirek Janatka Théo Trotouin, Jonathan Shapey, Mads S. Bergholt, Tom Verauteren International Conference on Medical Image Computing and Computer Assisted Intervention (MICCAI), 2023. |
|
Christopher E. Mower, João Moura, Nazanin Zamani Behabadi, Sethu Vijayakumar, Tom Verauteren, Christos Bergeles. IEEE International Conference on Robotics and Automation (ICRA), London, UK, 2023. |
|
Aya Mutaz Zeidan, Zhouyang Xu, Christopher E. Mower, Honglei Wu, Quentin Walker, Oyinkansola Ayoade, Natalia Cotic, Jonathan Behar, Steven Williams, Aruna Arujuna, Yohan Noh, Richard James Housden, Kawal Rhode. IEEE International Conference on Robotics and Automation (ICRA), London, UK, 2023. |
|
Christopher E. Mower, Theodoros Stouraitis, João Moura, Christian Rauch, Lei Yan, Nazanin Zamani Behabadi, Michael Gienger, Tom Verauteren, Christos Bergeles, Sethu Vijayakumar. Proceedings of the Conference on Robot Learning (CoRL), Auckland, New Zealand, 2022. abstract PMLR OpenReview video arXiv code poster documentation bibtex |
|
Christopher E. Mower, João Moura, Theodoros Stouraitis, Sethu Vijayakumar. Proceedings of the IEEE ICRA Workshop on Shared Autonomy in Physical Human-Robot Interaction: Adaptability and Trust, Philadelphia (PA), USA, 2022. |

|
Christopher E. Mower PhD Thesis, The University of Edinburgh, 2022. PhD funded through an iCASE studentship by Costain and EPSRC - UKRI.
Supervisor: Profesor Sethu Vijayakumar FRSE.
|
|
Christopher E. Mower, João Moura, Sethu Vijayakumar. Proceedings of Robotics: Science and Systems (R:SS), Virtual Conference, 2021. |
|
Christopher E. Mower, João Moura, Aled Davies Sethu Vijayakumar, 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), New Delhi, India, 2019. |
|
Christopher E. Mower, João Moura, Sethu Vijayakumar, IEEE 15th International Conference on Automation Science and Engineering (CASE), Vancouver, Canada, 2019. |

|
Wolfgang Merkt, Yiming Yang, Theodoros Stouraitis, Christopher E. Mower, Maurice Fallon, Sethu Vijayakumar, IEEE Conference on Automation Science and Engineering (CASE), Xi'an, China, 2017. [First Prize for Greatest Potential for Positive Impact at the Robots for Resilient Infrastructure Challenge] abstract pdf video outreach demo press (BBC) press (Made In Leeds TV) bibtex |
|
The following are some old projects. |

|
Christopher E. Mower, Objective Assessment for Surgical Dexterity, Masters Dissertation, Imperial College London, 2016. Supervisor: Dr Benny Lo.
|

|
Christopher E. Mower, Learning Catheter Paths for Cardiac Mapping, Independent Study Option, Imperial College London, 2016. Supervisor: Dr Su-Lin Lee.
|

|
Christopher E. Mower, Shrinking for Restoring Definiteness, Masters Dissertation, The University of Manchester, 2015. The dissertation was funded by the Numerical Algorithms Group (NAG) through an industrial bursary. Supervisors: Professor Nicholas J. Higham FRS, and Dr Craig Lucas. |

|
Supervisor: Dr Craig Lucas. As apart of an internship at NAG, I analyzed several algorithms for fixing invalid correlation matrices and implemented an optimized algorithm in FORTRAN. The code was included in the NAG Library. Furthermore, I authored the documentation and was involved with developing unit tests and example usage code. |