|
OpTaS
1.0.7
An optimization-based task specification library for trajectory optimization and model predictive control.
|
|
OpTaS
1.0.7
An optimization-based task specification library for trajectory optimization and model predictive control.
|
Public Member Functions | |
| def | __init__ (self, Optimization optimization, bool error_on_fail=False) |
| Constructor for the base Solver class. More... | |
| type | opt_type (self) |
| Optimization type. More... | |
| def | setup (self, *args, **kwargs) |
| Setup solver, note this method must return self. More... | |
| None | reset_initial_seed (self, Dict[str, ArrayType] x0) |
| Reset initial seed for the optimization problem. More... | |
| None | reset_parameters (self, Dict[str, ArrayType] p) |
| Reset the parameters for the optimization problem. More... | |
| Dict | solve (self) |
| Solve the optimization problem. More... | |
| def | stats (self) |
| Return stats from solver. More... | |
| Tuple | violated_constraints (self, Dict[str, ArrayType] x, Dict[str, ArrayType] p) |
| Indicate the violated constraints. More... | |
| bool | did_solve (self) |
| Returns true when the solver solved the previous problem, false otherwise. More... | |
| int | number_of_iterations (self) |
| Returns the number of iterations required to solve the problem. More... | |
| CasADiArrayType | evaluate_cost (self, Dict[str, ArrayType] x, Dict[str, ArrayType] p) |
| Evaluates the cost function for given decision variables x and parameters p. More... | |
| List | evaluate_cost_terms (self, Dict[str, ArrayType] x, Dict[str, ArrayType] p) |
| Evaluates each cost term for given decision variables and parameters. More... | |
Static Public Member Functions | |
| interp1d | interpolate (cs.DM traj, float T, **interp_args) |
| Interpolate a trajectory. More... | |
Public Attributes | |
| opt | |
| Instance of the optimization problem. More... | |
| x0 | |
| Initial guess for the optimization problem (set using reset_initial_seed). More... | |
| p | |
| Parameter vector. More... | |
Private Member Functions | |
| CasADiArrayType | _solve (self) |
| Solve the optimization problem and return the optimal decision variables as an array. More... | |
Private Attributes | |
| _p_dict | |
| Parameter dictionary. More... | |
| _error_on_fail | |
| When True, after solve() is called, if the solver did not converge then a RuntimeError is thrown. More... | |
| _solution | |
| Solution container. More... | |
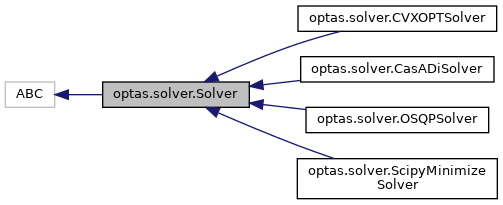
Solver base class.
Base solver interface class
| def optas.solver.Solver.__init__ | ( | self, | |
| Optimization | optimization, | ||
| bool | error_on_fail = False |
||
| ) |
Constructor for the base Solver class.
@param optimization The optimization problem created by calling the build method of the OptimizationBuilder class. @param error_on_fail When True, after solve() is called, if the solver did not converge then a RuntimeError is thrown. Default is False. @return An instance of the Solver class.
|
private |
Solve the optimization problem and return the optimal decision variables as an array.
This is an abstract method.
@return The solution from the solver.
Reimplemented in optas.solver.ScipyMinimizeSolver, optas.solver.CVXOPTSolver, optas.solver.OSQPSolver, and optas.solver.CasADiSolver.
| bool optas.solver.Solver.did_solve | ( | self | ) |
Returns true when the solver solved the previous problem, false otherwise.
This is an abstract method.
@return Result of whether the solver succeeded or not.
Reimplemented in optas.solver.ScipyMinimizeSolver, optas.solver.CVXOPTSolver, optas.solver.OSQPSolver, and optas.solver.CasADiSolver.
| CasADiArrayType optas.solver.Solver.evaluate_cost | ( | self, | |
| Dict[str, ArrayType] | x, | ||
| Dict[str, ArrayType] | p | ||
| ) |
Evaluates the cost function for given decision variables x and parameters p.
@param x The values for the decision variables. @param p The values for the parameters. @return The cost that results from x and p.
| List optas.solver.Solver.evaluate_cost_terms | ( | self, | |
| Dict[str, ArrayType] | x, | ||
| Dict[str, ArrayType] | p | ||
| ) |
Evaluates each cost term for given decision variables and parameters.
@param x The values for the decision variables. @param p The values for the parameters. @return List corresponding to each cost term evalauted at x, p.
|
static |
Interpolate a trajectory.
@param traj The trajectory to be interpolated where the columns correspond to the states over time. @param T The time duration of the trajectory. @return An interpolated function.
| int optas.solver.Solver.number_of_iterations | ( | self | ) |
Returns the number of iterations required to solve the problem.
This is an abstract method.
@return Number of iterations.
Reimplemented in optas.solver.ScipyMinimizeSolver, optas.solver.CVXOPTSolver, optas.solver.OSQPSolver, and optas.solver.CasADiSolver.
| type optas.solver.Solver.opt_type | ( | self | ) |
Optimization type.
@return The type of the optimization problem.
| None optas.solver.Solver.reset_initial_seed | ( | self, | |
| Dict[str, ArrayType] | x0 | ||
| ) |
Reset initial seed for the optimization problem.
@param x0 The initial seed.
| None optas.solver.Solver.reset_parameters | ( | self, | |
| Dict[str, ArrayType] | p | ||
| ) |
Reset the parameters for the optimization problem.
@param p Specifies the parameters.
Reimplemented in optas.solver.ScipyMinimizeSolver, optas.solver.CVXOPTSolver, and optas.solver.OSQPSolver.
| def optas.solver.Solver.setup | ( | self, | |
| * | args, | ||
| ** | kwargs | ||
| ) |
Setup solver, note this method must return self.
This is an abstract method.
| Dict optas.solver.Solver.solve | ( | self | ) |
Solve the optimization problem.
@return A dictionary containing the solution.
| def optas.solver.Solver.stats | ( | self | ) |
Return stats from solver.
The return type is specifc to the solver used. This is an abstract method.
@return The statistics returned by the solver. This is specified to the solver used.
Reimplemented in optas.solver.ScipyMinimizeSolver, optas.solver.CVXOPTSolver, optas.solver.OSQPSolver, and optas.solver.CasADiSolver.
| Tuple optas.solver.Solver.violated_constraints | ( | self, | |
| Dict[str, ArrayType] | x, | ||
| Dict[str, ArrayType] | p | ||
| ) |
Indicate the violated constraints.
@param x The values for the decision variables. @param p The values for the parameters. @return Several lists that contain information regarding which constraints are violated.
|
private |
When True, after solve() is called, if the solver did not converge then a RuntimeError is thrown.
|
private |
Parameter dictionary.
|
private |
Solution container.
| optas.solver.Solver.opt |
Instance of the optimization problem.
| optas.solver.Solver.p |
Parameter vector.
| optas.solver.Solver.x0 |
Initial guess for the optimization problem (set using reset_initial_seed).